序文:全体アーキテクチャ
同じ車輪がある
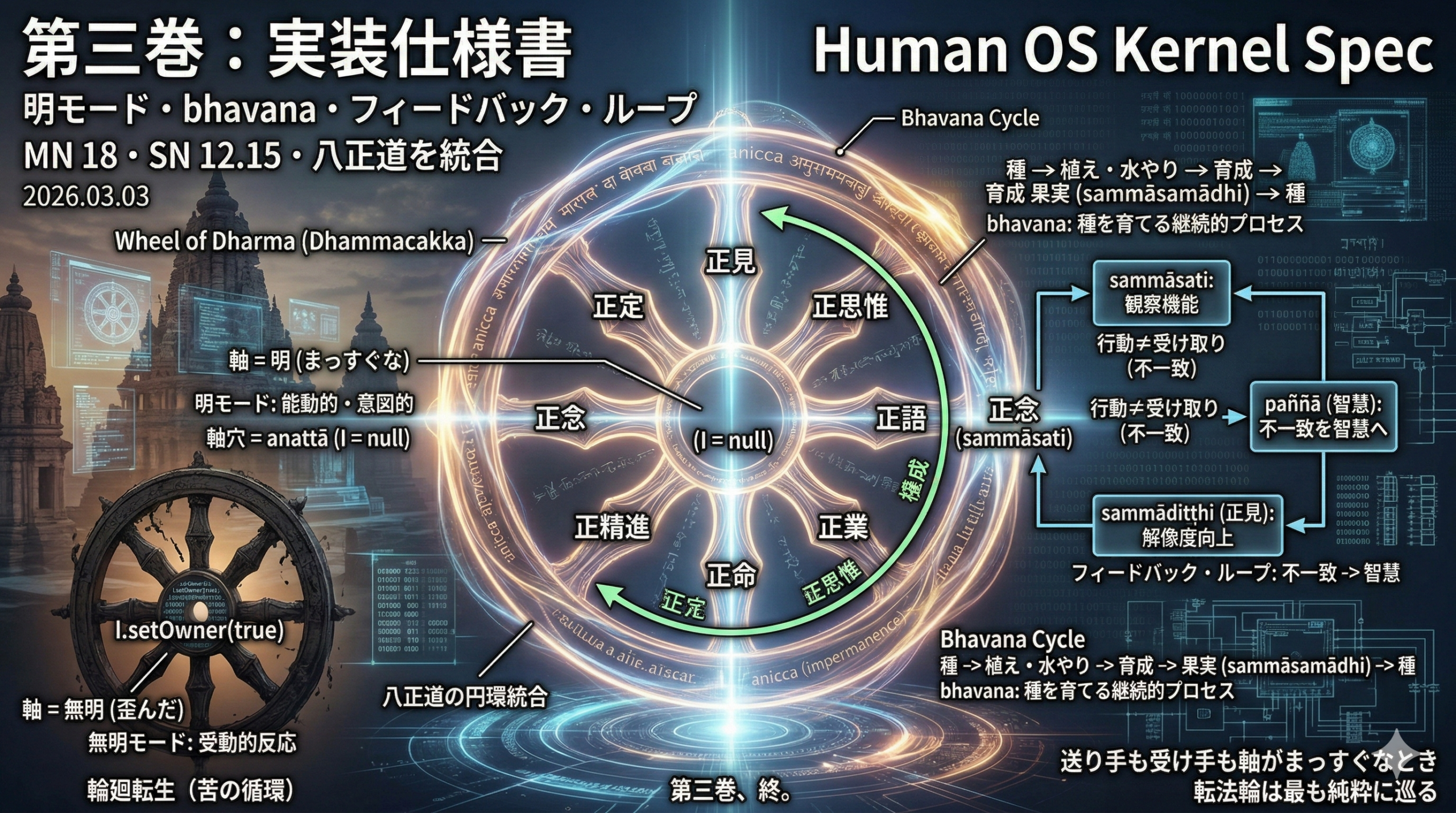
軸 = 無明(avijjā)→ 輪廻転生(苦の循環)
軸 = 明(vijjā) → 転法輪(救済の循環)
車輪 = anicca(無常)── どちらも同じ車輪
軸穴 = anattā(無我)── I = null
四つの仕様書は
この一つの構造を
異なるスケールから記述する
第一巻(MN 18) ── 軸がずれる瞬間
第二巻(SN 12.15) ── 軸をまっすぐにする方法
第三巻 ── まっすぐな軸で動き始めるとき
第四巻(SN 56.11) ── 転法輪の完全な仕様目次
00. ドキュメント概要
第一巻・第二巻を前提として、以下を記述する。
① 因果の方向:無明モードと明モードの対比 ② bhavanaの正確な定義:操作ではなく育成 ③ sammāsamādhiの正確な定義:果実の受け取り ④ フィードバック・ループ:不一致がpaññāになる条件 ⑤ 八正道の円環構造
01. 二つのモード:因果の支配権
【無明モード】
avijjā → … → 触 → 受(ここから意識に上る)
↓
外界が受の内容を決める
↓
受 → 想 → 行動(反応)
悪いことがあれば悪い行動をし
いいことがあればいいことをする
── 支配権は外界にある
── 外部が I.setOwner() の呼び出し元【明モード】
avijjāの滅尽 → sammāsaṅkappa(正思惟)
↓
行動(能動的・意図的)
↓
受(結果として来る)
↓
想 → 識
優しさを行動すれば優しさを受け取る
── 支配権は自分にある
── 自分が I.setOwner() の呼び出し元核心:
無明 ── 受け取ってから考える(受動)
明 ── 考えてから受け取る(能動)
この順序の逆転が支配権のすべてを決める02. bhavanaの正確な定義
【誤った理解】
bhavana ── スイッチを切り替える操作【正しい定義】
bhavana ── 種を植え、水をやり、育て続けること
· 即座の結果を期待しない
· 結果を掴みに行かない
· ただ育て続ける継続的プロセス
· 不一致があっても水のやり方を変えて続ける【sammāsamādhiの正確な定義】
誤:能動的に作り出す実行状態
正:正思惟 → 行動 → その果実として自然に到来するもの
受け取るものであって操作するものではない
掴みに行った瞬間に崩れる ── I.setOwner(true) の発動03. 八正道の円環構造
【誤った理解:線形パイプライン】
sammāsaṅkappa → 行動層 → sammāsamādhi(終点)【正しい理解:円環・相互支持】
sammādiṭṭhi(正見)
↓
sammāsaṅkappa(正思惟)── vitakkaで方向を設定
↓
sammāvācā(正語) ┐
sammākammanta(正業) │── 行動層
sammāājīva(正命) ┘
↓
sammāvāyāma(正精進) ┐
sammāsati(正念) │── 実行層・観察層
↓
sammāsamādhi(正定) ── 果実の受け取り
↓
sammādiṭṭhi がさらに深まる
↓
また種になる ── 終点ではなく円環果実がまた種になる。これはbhavanaの比喩と完全に一致する。
04. フィードバック・ループ
sammāsatiの役割:
行動と結果の間の観察機能
── 不一致に最初に気づくもの
── これがなければ不一致はpapañcaに飲み込まれる
── フィードバック・ループの前提条件【完全なサイクル】
avijjāの滅尽 → 行動
↓
受(結果)
↓
┌── 一致 ──────────────────────────────┐
│ 行動 = 受け取り │
│ sammāsamādhi が深まる │
│ bhavanaが実を結ぶ │
└──────────────────────────────────────┘
┌── 不一致 ────────────────────────────┐
│ 行動 ≠ 受け取り │
│ ↓ │
│ sammāsati が気づく │
│ ↓ │
│ paññā(智慧)が生じる │
│ 「こうしたら良かった」 │
│ 「次はこうしよう」 │
│ ↓ │
│ sammādiṭṭhi が深まる │
│ (更新ではなく解像度が上がる) │
│ ↓ │
│ 次の bhavana へ │
└──────────────────────────────────────┘05. 不一致の分岐点
【無明モード:不一致の処理】
行動 ≠ 受け取り
↓
papañca が起動
「なぜだ・相手が悪い・自分が悪い」
↓
随眠が書き込まれる
種を自ら掘り返す
── システムが劣化する【明モード:不一致の処理】
行動 ≠ 受け取り
↓
sammāsati が気づく
↓
paññā が生じる「水のやり方を変えよう」
↓
sammādiṭṭhi が深まる
bhavana を続ける
── システムが改善される不一致は:
無明モードでは papañca の原料
明モードでは paññā の原料
同じ入力から正反対の出力が生じる06. 受け取る側の仕様
送り手:I = null → 転法輪が生じる
↓
Dhammaが届く
受け手:明が軸(I = null)
→ 摩擦なく受け取れる
→ 最も深く受け取れる
→ そのまま次の人へ転がっていく
→ 転法輪が続く
受け手:無明が軸(I.setOwner(true))
→ 歪んで届く
→ 一部しか受け取れない
→ 車輪が止まる・輪廻の因になる
送り手も受け手も軸がまっすぐなとき
転法輪は最も純粋に巡る第三巻、終。
コメント